
Global Positioning System (GPS) переводится как глобальная система позиционирования. Термин «позиционирование» — более широкий по отношению к термину «определение местоположения». Позиционирование помимо определения координат включает определение вектора скорости движущегося объекта. Полное название системы GPS Navstar (Navigation System with Time and Ranging) — навигационная система на основе временных и дальномерных измерений.
GPS состоит из трех частей: космического сегмента, сегмента управления и контроля и сегмента пользователей. Спутниковый сегмент состоит из созвездия функционирующих в эпоху наблюдений спутников. Сегмент управления и контроля содержит главную станцию управления и контроля, станции слежения за спутниками и станции закладки информации в бортовые компьютеры спутников. Сегмент пользователя — это совокупность спутниковых приемников, находящихся в работе.
Номинально в каждый момент времени имеется 24 работающих спутника, которые распределены по шести круговым орбитам. На каждой орбите, таким образом, находится четыре спутника. Плоскости орбит разнесены по долготе на 60 градусов. Наклон плоскости орбиты к плоскости экватора составляет 53 градуса. Расстояние спутников от поверхности Земли — 20,2 тыс. километров. При такой высоте орбиты период обращения равен половине звездных суток. Наблюдателю это удобно. Он знает, что если сегодня в такое-то время спутник находится в такой-то точке небосклона, то ровно через сутки тот же спутник будет примерно там же. Удобно планировать наблюдения. Самым дорогим оборудованием спутников являются атомные эталоны частоты-времени, обеспечивающие наносекундную точность хода бортовых часов.
В задачи сегмента управления и контроля (Operational Control System) входит слежение за спутниками для определения параметров их орбит (эфемерид) и поправок часов относительно системного времени GPS, прогноз орбит спутников и их местоположения на орбитах (прогноз эфемерид), временная синхронизация часов относительно времени системы, загрузка навигационного сообщения в бортовые компьютеры спутников. Главная станция управления и контроля (Consolidated Space Operations Center) находится в Колорадо-Спрингс (США). Центр собирает и обрабатывает данные со станций слежения, вычисляет и предсказывает эфемериды спутников, а также параметры хода часов.
Затем данные передают на одну из трех наземных станций для закладки информации в память бортовых компьютеров. Пять станций слежения за спутниками, равномерно расположенные по всему миру, каждые полторы секунды определяют дальность до всех находящихся над горизонтом спутников. Данные слежения передаются на главную станцию управления и контроля.
Пользователи системы разделяются на категории по нескольким признакам: военные и гражданские, авторизованные и неавторизованные, навигаторы и геодезисты. Задачи навигации в значительной мере сводятся к определению текущих координат транспортного средства с ошибкой 10-15 м, а также к определению скорости и направления его движения. Кроме того, навигационный приемник указывает требуемый и реальный курс на заданный объект, отклонение от маршрута, предписывает маневры, желательные для возвращения на курс. Навигационный режим измерений является кодовым, поскольку приемник обрабатывает сигнал спутника именно как кодовый сигнал.
Измеряемыми величинами являются: задержка сигнала и доплеровское смещение частоты, позволяющие вычислять дальность и радиальную скорость. При геодезических измерениях точность определения текущих координат на несколько порядков выше, чем в навигации. В этом случае одновременно работают несколько приемников, причем по крайней мере один из них должен быть установлен на пункте с известными координатами. Геодезический приемник кроме анализа кодовой последовательность непрерывно регистрирует мгновенное значение фазы. Обработка этих данных специальным программным обеспечением позволяет достигать сантиметровой точности в определении местоположения.
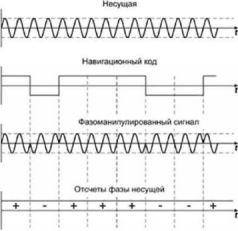
Одновременное обеспечение требований по измерению дальности и скорости при простой структуре сигнала невозможно, поэтому приемлемым для таких измерений является использование шумоподобных сигналов, таких, например, как псевдослучайная последовательность импульсов. Упрощенный вид подобного сигнала представлен на рисунке. Здесь фаза высокочастотной несущей модулируется навигационным кодом, который содержит дальномерный код (его автокорреляционная функция имеет очень острый максимум) и код двоичной служебной информации.
Такой принцип формирования сигнала системы позволяет по измерению доплеровского сдвига частоты несущей определять скорости, а по задержке элементов дальномерного кода — дальность до спутника, при этом служебный код несет всю вспомогательную информацию (эфемериды спутников, альманах системы и др.), необходимую для обеспечения работы навигационного приемника.
Глава 3. Принцип работы систем спутниковой навигации
Возможность определять координаты вне зависимости от капризов природы и времени суток появилась с началом освоения космоса. Днем рождения спутниковой навигации принято считать 4 октября 1957 года, когда был запущен первый искусственный спутник Земли. Однако лишь в конце 70-х годов была создана первая спутниковая радионавигационная система (СРНС), которая позволяла определить координаты объекта при помощи радиосигналов, передаваемых со спутника.
СРНС применяются для определения положения и ориентации сухопутных, воздушных и морских подвижных объектов. При строительстве туннеля под Ла-Маншем строители начали копать с противоположных сторон, сопоставляя свои местоположения при помощи СРНС NAVSTAR (GPS), что, в результате, позволило им встретиться ровно посередине. Системы навигации используются геодезистами, спасателями, работают на баллистических ракетах. Не первый год за рубежом в комплектацию некоторых моделей автомобилей входит приемник GPS-сиг-налов (при ввозе автомобилей в Россию приемники отключаются — этого требует наше законодательство).
Основными требованиями, которые предъявляются к СРНС, являются точность определения координат и времени и возможность получать навигационную информацию в любой момент. СРНС первого поколения — «Транзит» в США и «Цикада» в СССР — этим требованиям не удовлетворяли: во-первых, длительные перерывы между сеансами навигации (до 30 минут в приполярных районах и до 2 часов в экваториальных) не позволяли пользователю определять свое местоположение, когда захочется. Во-вторых, погрешность определения горизонтальных координат подвижного объекта была довольно большой — от 10 до 100 м. Кроме того, СРНС первого поколения не давали информации о высоте и скорости объекта.
В СРНС второго поколения был внесен ряд изменений. Проблема точности и оперативности определения координат была решена за счет увеличения количества спутников в системе.
Чтобы пользователь мог в любой момент узнать свое местоположение и время, необходимо было обеспечить одновременную радиовидимость как минимум четырех спутников, расположенных определенным образом.
Для решения этой задачи достаточно, чтобы на орбите находилось 18 спутников, однако было решено использовать 24 — для повышения точности определения координат самих спутников.

Принцип работы систем спутниковой навигации таков. Приемник навигационных сигналов измеряет задержку распространения сигнала от каждого из видимых спутников до приемника. Задержка сигнала, умноженная на скорость света, — это расстояние от спутника в момент излучения до приемника в момент приема. Из принятого сигнала приемник получает информацию о положении спутника.
Геометрически работу спутниковой навигационной системы можно продемонстрировать следующим образом: пользователь находится в точке пересечения нескольких сфер, центрами которых являются видимые спутники. Радиусы сфер равны дальности до каждого из спутников. Для определения широты и долготы приемнику необходимо принимать сигналы как минимум от трех спутников; прием сигнала от четвертого спутника позволяет определить и высоту объекта над поверхностью. Эти данные позволяют найти координаты пользователя, решив некоторую систему уравнений. При определении координат объекта возникают ошибки, связанные с влиянием ионосферы, температуры воздуха, атмосферного давления и влажности (каждый фактор вносит погрешность до 30 м). Эфемеридная погрешность (разница между расчетным и реальным положением спутника) составляет от 1 до 5 м; интерференция тоже вносит свой вклад. Суммарная ошибка может достигать 100 м.
Для уменьшения погрешностей используется так называемый дифференциальный режим GPS (Differential GPS). В этом режиме приемник пользователя получает поправки к своим координатам от базовой