достоинством, определявшим их судьбу – принципиальной новизной, позволявшей справиться с задачами, не решаемыми другими, более отработанными средствами. Яркими примерами могут служить уродливые французские бронированные плавучие батареи, в 1855 году принудившие к сдаче русскую крепость Кинбурн или не менее безобразные английские танки, в значительной мере решившие исход Первой мировой войны.
Оставляла желать лучшего и первая принятая на вооружение советской истребительной авиации система управляемого ракетного оружия. Несмотря на явные недостатки, она была запущена в массовое серийное производство на пяти заводах и, в модернизированных вариантах, состояла на вооружении до восьмидесятых годов. В результате, ко времени завершения разработки более совершенных образцов в нашей стране сформировалась отлаженная кооперация предприятий производителей управляемых ракет, а истребительная авиация накопила богатый опыт эксплуатации и применения ракетного оружия.
Работы по созданию системы ракетного вооружения истребителей-перехватчиков, в дальнейшем получившей обозначение К-5, начались в КВ-1 Третьего Главного управления при Совете Министров СССР в 1951 году. Официально работа была задана правительственным Постановлением от 1 апреля 1952 г. N«1587-590. В отличие от разрабатывавшейся в те же годы для Ту-4 системы вооружения Г-300, К-5 изначально задумывалась как достаточно миниатюрное для тех лет управляемое оружие, пригодное для размещения на фактически единственном реактивном истребителе тех лет – МиГ-15, позднее смененным в производстве весьма близким по характеристикам и техническому облику МиГ-17. Более того, на этом небольшом самолете предусматривалась установка четырех пусковых устройств с ракетами, что, по замыслу разработчиков, должно было обеспечивать достаточно высокую вероятность поражения цели.
Важную роль в работе над новой системой сыграл коллектив головной организации по авиационной радиолокации – НИИ-17, возглавляемый Виктором Васильевичем Тихомировым. В 1952 г. на вооружение истребителей Ми Г-15 и Ми Г-17 приняли бортовой радиолокационный прицел 'Изумруд'. Накопленный НИИ- 17 технический задел позволил в считанные месяцы после решения ряда принципиальных вопросов перейти к испытаниям на Ми Г-17 опытных образцов РЛС 'Изумруд-2', которая в дальнейшем стала частью системы вооружения К-5. РЛС семейства 'Изумруд', в различных модификациях устанавливавшиеся на всепогодных вариантах МиГ-17, МиГ-19 и на первых серийных Як-25, выполнили по непривычной для нашего времени схеме – с двумя антенными блоками. По центру воздухозаборника самолета под оживальным обтекателем размещалась тарельчатая антенна канала слежения за целью. В 'губовидном' обтекателе над воздухозаборником в плоскости, параллельной крыльям истребителя, вращался блок из двух противоположно направленных параболических антенн канала обнаружения.
Разработка ракеты 'воздух-воздух' для новой системы вооружения была начата в отделе 32 КБ-1, где ее возглавил известный авиаконструктор Д.Л. Томашевич. В несекретных документах ракета получила обозначение 'ШМ'. По преданию, этот индекс расшифровывался как 'Ш – малая', видимо в отличие от разрабатывавшейся этим же коллективом 'Ш – большой' – зенитной управляемой ракеты 'ШБ'.
В основе построения системы управления полетом ракеты был положен принцип наведения на цель по лучу самолетной РЛС наведения. Станция наведения перехватчика 'Изумруд-2' в процессе своей работы создавала с помощью кодированных импульсов систему координат управления ракетой. Аппаратура радиоуправления ракетой представляла собой два идентичных независимых канала, которые обеспечивали выработку необходимых сигналов управления движением ракеты в двух взаимно перпендикулярных плоскостях. В состав бортовой аппаратуры ракеты входил трехканальный автопилот, обеспечивавший как се управление и стабилизацию в плоскостях управления, так и стабилизацию относительно продольной оси.
В процессе атаки летчик осуществлял управление самолетом таким образом, чтобы отметка от цели оказалась в центре экрана индикатора бортовой РЛС. Далее он переводил радиолокатор в режим автоматического сопровождения и при достижении разрешенной дальности производил пуск. До момента попадания в цель требовалось удерживать отметку от цели в пределах экрана РЛС. В процессе наведения аппаратура ракеты осуществляла прием сигнала РЛС 'Изумруд-2', работающей в режиме конического сканирования. При отходе ракеты от равносигнальной зоны амплитуда сигнала менялась в соответствии с величиной отклонения. Осуществляемое самолетной РЛС модулирование сигнала обеспечивало определение направления отклонения от равносигнальной зоны (вверх-вниз, вправо-влево). Вырабатываемый приемной радиоаппаратурой сигнал рассогласования поступал на элементы автопилота, обеспечивая возвращение ракеты в равносигнальную зону.
Для ракеты 'ШМ' использовали аэродинамическая схему 'утка' с крестообразно расположенными крыльями и рулями. Особую роль в подобном выборе сыграло то, что при относительно небольших размерах рулей обеспечивалась требуемая маневренность ракеты и ее аэродинамическая устойчивость при различных режимах полета.
Крылья ракеты имели форму, близкую к треугольной. В начале пятидесятых годов они характеризовались как 'ромбовидные' – передняя кромка имела положительную стреловидность 60°, задняя – отрицательную, 12°. Предложенная группой аэродинамиков ЦАГИ во главе с П.П. Красильщиковым, эта форма крыльев малого удлинения (1…1,5) нашла широкое применение на советских ракетах тех лет. Напротив, попытки применения ромбовидных крыльев на пилотируемых самолетах (Як-100, цыбинский 'РСР') не увенчались успехом из-за недостаточных несущих свойств на малых скоростях. Для стабилизации ракеты по крену на всем протяжении ее полета после схода с направляющей балки самолета, в том числе и на участке до момента начала радиоуправления, на ее крыльях установили элероны.
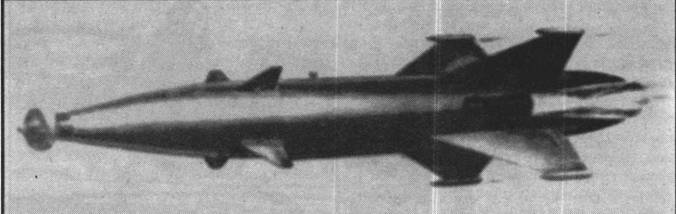
Конструктивно корпус ракеты состоял из пяти отсеков, которые соединялись между собой с помощью резьбовых соединений, шпилек и винтов. Основными материалами конструкции стали широко применявшиеся в промышленности алюминиевые и магниевые сплавы. Лишь двигатель ракеты изготавливался из стали.
В носовой части размещался радиовзрыватель АР-10 с характерной кольцевой антенной, а за ним – боевая часть. Далее находился второй отсек – управления. Диаметрально противоположные рули устанавливались на общих осях. Для упрощения пространственной развязки осей расположенные в перпендикулярных плоскостях пары рулей сдвинули друг относительно друга вдоль длины ракеты. Интересной особенностью 'ШМ' стали рулевые машинки, связанные с рулевыми поверхностями – рулями и элеронами ракеты – своим подвижным корпусом, в то время как их штоки были зафиксированы на корпусе ракеты. Для задействования машинок каналов тангажа и курса воздух и электрические сигналы подавались во второй отсек по трубопроводу и кабелям, проложенным в установленном внизу корпуса ракеты гаргроте. Третий отсек представлял собой твердотопливный ракетный двигатель с двумя соплами. Между соплами двигателя в четвертом отсеке размещалась электрическая батарея. Стабилизация по крену обеспечивалась размещенными в том же отсеке двухстепенным гироскопом, интегрирующим устройством и рулевой машинкой, через крестовину связанной с элеронами, установленными на каждой консоли крыла ракеты. Пятый отсек служил для размещения аппаратуры радиоуправления и завершался штыревой приемной антенной. На законцовках крыльев устанавливались трассеры.
Особого внимания от разработчиков потребовал двигатель. Конечно, он был твердотопливным – другие для этой цели просто не подходили. А вот место для двигателя на этой ракете пришлось поискать. На большинстве ракет того времени двигатель устанавливался в хвостовой части, что выглядело наиболее логичным. Ничто не мешало движению газовой струи, и в то же время сама струя раскаленных газов не касалась элементов ракеты. На ракете 'ШМ' это правило пришлось нарушить сразу по двум причинам. Во- первых, в хвостовой части ракеты требовалось разместить антенну приемника команд от станции наведения. Во-вторых, положение центра масс ракеты не должно было значительно изменяться в процессе выгорания топлива. В противном случае возможностей системы управления могло не хватить для выполнения противоречивых требований по стабилизации ракеты в начале полета и обеспечению требуемой маневренности по завершении работы двигателя на участке подхода к цели. Примирить эти требования удалось за счет установки двигателя в средней части ракеты. Тяга в этом случае создавалась двумя относительно небольшими соплами, располагавшимися на боковой поверхности ракеты. Такое конструктивное исполнение позволило решить еще одну проблему – беспрепятственного прохождения радиолуча через шлейф раскаленных газов к антенне ракеты.